Microchip Frequency and Time System Jammertest 2024 Report
Discover how real-world testing at Jammertest is driving resilient PNT solutions for critical infrastructure. Read the 2024 report.

The Significance of Global Navigation Satellite System (GNSS) Interference Research
Research into GNSS jamming and spoofing is critically important as global reliance on satellite-based positioning, navigation and timing (PNT) services continues to grow across sectors such as aviation, maritime, telecommunications, finance and defense. These systems are vulnerable to intentional interference, which can cause service disruptions, navigation errors or complete system failures—potentially leading to severe operational, economic or even safety consequences. As adversaries develop more sophisticated electronic warfare capabilities, understanding and mitigating the risks of jamming and spoofing becomes essential for ensuring the resilience and security of both civilian infrastructure and military operations. This report explores current research, testing methodologies and emerging technologies aimed at detecting, preventing and responding to GNSS interference threats.
What Is a GNSS Jamming and Spoofing Testing Event?
A GNSS jamming and spoofing test event is a controlled exercise designed to evaluate how GNSS receivers and related technologies respond to intentional interference. Jamming involves the deliberate transmission of radio frequency signals to disrupt or block legitimate satellite signals, while spoofing involves sending fake GNSS signals to mislead a receiver into calculating an incorrect position, time or velocity. These events are typically held in restricted or authorized test environments, often coordinated by military or government agencies, and involve participants such as defense contractors, GNSS equipment manufacturers, navigation system developers and researchers. The primary goal is to assess the resilience and robustness of systems under attack, validate anti-jamming and anti-spoofing technologies and refine operational procedures to ensure the reliability of PNT services in critical applications.
What Is Jammertest?
Jammertest is a specialized GNSS interference testing event hosted in Bleik, Norway, organized to evaluate the resilience of satellite navigation systems against jamming and spoofing threats in a controlled, real-world environment. Conducted at the Andøya Space Defense test range, Jammertest brings together stakeholders from government, defense, industry and academia all over the world to expose GNSS-dependent systems to intentional interference scenarios. The event allows participants to assess the performance of their technologies under electronic attack, validate mitigation strategies and enhance operational readiness. By simulating realistic threats, Jammertest supports the development of more robust PNT solutions, contributing to the broader goal of securing critical infrastructure and national security against GNSS vulnerabilities.
Test Set Up
Microchip brought the GNSS BlueSky® Firewall 2200, TimeProvider® 4100 and SyncServer® S650 all equipped with embedded BlueSky Technology. Our equipment participated in 38 stationary jamming and spoofing test blocks.
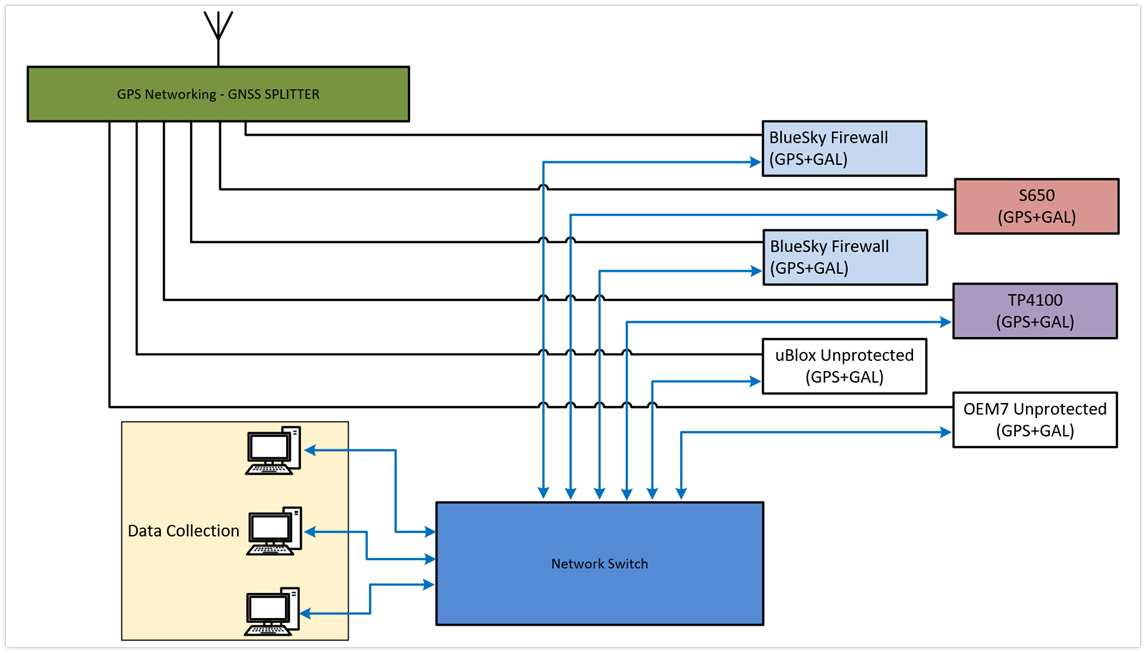
Figure 1. Test set up configuration
- Day 1 of testing included:
- High-power jamming with consistent power, power sweeps and power ramps
- Continuous wave signals transmitted across L1, G1, L2 and L5
- Pseudo-Random Noise signals transmitted across E6, E5b, L5, G2, L2, B1I, G1 and L1
- Bandwidth and chip rate variations
- Day 2:
- Position jumps, small position jumps with and without continuous jamming
- Simulated driving affecting Galileo only, GPS only and both
- Day 3:
- Time offsets of 15 and –3 minutes from real time, with and without power jumps affecting E1, L1 or neither at different power
- Static and pseudo range errors, with and without initial and continuous jamming
- Leap second spoofing with initial and continuous jamming
- Day 4:
- Static position and time manipulation to +2 years and April 2019, with power ramping, and initial and continuous jamming
Here are the test blocks we’ll be looking at.
- 1.6.1
- High power jamming
- Power ramping: 0.2 µW (-37 dBm) to 50 W (47 dBm) with 2 dB increments
- Jammer F8.1 “Porcus Major”
- PRN: L1
- 1.8.1
- High power jamming
- 50 W PRN pyramid: E6, E5b, L5, G2, L2, B1I, G1, L1
- Jammer F8.1 “Porcus Major”
(1.6.1) Similarities Between BlueSky GNSS Firewall Metrics and SyncServer S650 Alarm Response
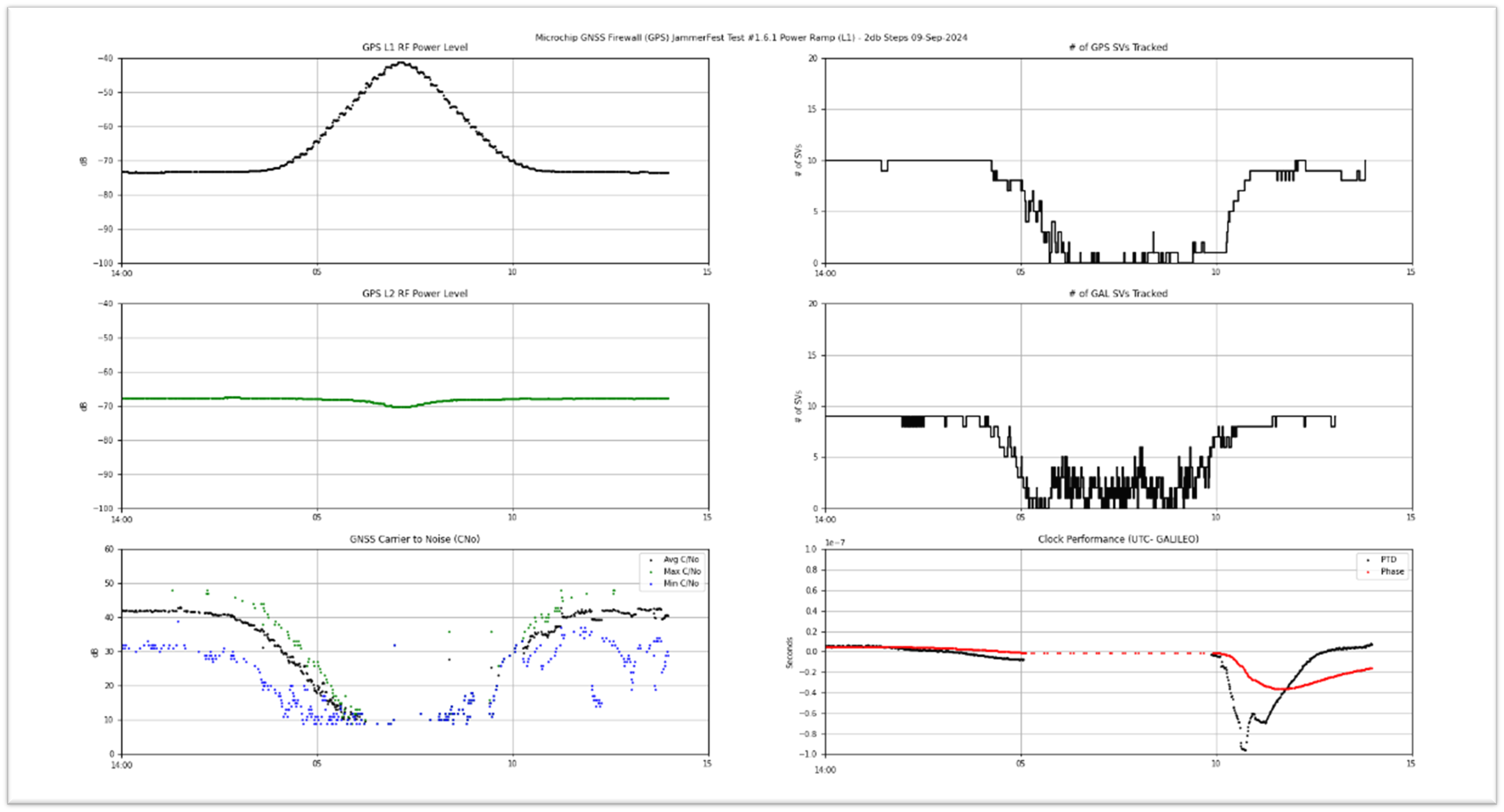 Figure 2. BlueSky GNSS Firewall – Test Block 1.6.1 |
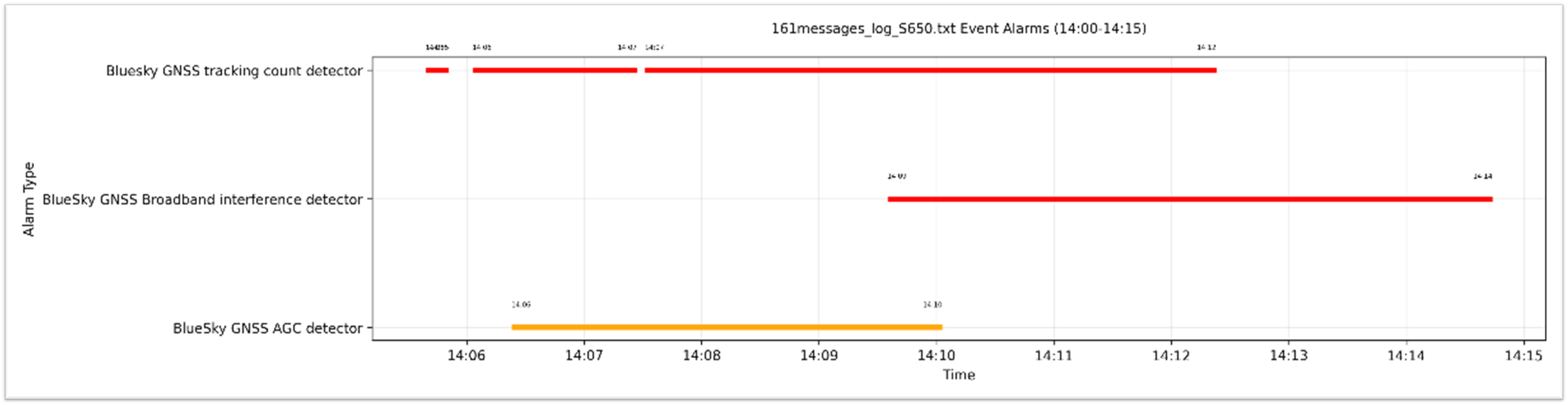 |
| Figure 3. SyncServer S650 – Test Block 1.6.1 |
These plots illustrate the GNSS performance monitoring capabilities of two different systems—the BlueSky GNSS Firewall and the SyncServer S650—during a controlled interference event. Although they use different measurement modalities, both systems exhibit a high degree of temporal and functional alignment in detecting and responding to GNSS degradation. Key similarities are outlined below.
Temporal Correlation in Interference Detection
- Both graphs capture the onset of a GNSS interference event beginning around 14:05 UTC and continuing through approximately 14:12–14:14 UTC.
- In the BlueSky GNSS Firewall plots, a rise in GPS L1 RF power level starts shortly after 14:00 and peaks just before 14:10, indicating an artificial increase in RF energy due to jamming.
- In the SyncServer S650 alarm plot, multiple alarms—including GNSS tracking count, broadband interference, and AGC alarms—are activated starting at 14:05, peaking between 14:06 and 14:12, which aligns precisely with the RF disturbance seen by BlueSky.
Loss of Satellite Tracking
- Both systems show evidence of satellite tracking degradation during the interference window:
- The BlueSky graph shows a sharp drop in the number of tracked GPS and Galileo satellites, with the count reaching nearly zero around 14:08.
- The S650's “tracking count detector” alarm is triggered continuously between 14:05 and 14:12, indicating that the device experienced a sustained inability to maintain satellite locks—consistent with the BlueSky satellite visibility drop.
RF Environment and Receiver Response
- Each system detects and reacts to changes in the RF environment:
- BlueSky’s L1 power level increases, and its Carrier-to-Noise Ratio (C/No) drops sharply between 14:05 and 14:10, confirming the presence of broadband interference.
- Correspondingly, the S650 issues “Broadband interference detector” alarms starting around 14:06, and AGC alarms indicate the receiver’s automatic gain control circuit is compensating for high input power—both triggered by the same elevated RF noise floor seen in BlueSky’s plots.
Complementary Signal Monitoring
Though the two systems serve different functions—BlueSky offering RF-level monitoring and the S650 generating system-level alarms—they both effectively confirm the same interference event with nearly identical timing. The BlueSky provides quantitative signal quality data (C/No, L1/L2 power, tracking loss), while the S650 offers operational alerts derived from the signal degradation.
Summary of Characteristics
Table 1. Summary of Characteristics between Firewall and SyncServer S650
Characteristic | Bluesky GNSS Firewall | SyncServer S650 | Similarity Highlighted |
Detection Start Time | ~14:05 UTC | ~14:05 UTC | Synchronized event onset |
Satellite Tracking Loss | Drop in GPS/Gal SV count | “Tracking Count Detector” alarms | Confirms tracking loss |
RF Interference Indication | Increased L1 power, dropped C/No | Broadband interference + AGC alarms | Confirms elevated RF power |
Detection Modality | Continuous RF + GNSS signal metrics | Discrete alarm system | Aligned responses from different layers |
These similarities suggest a strong correlation between signal-level degradation and system-level alarms, reinforcing the value of using both BlueSky and SyncServer S650 in tandem for comprehensive GNSS threat detection.
(1.8.1) Comparative Analysis of GNSS Disruption Response: BlueSky GNSS Firewall vs. TimeProvider 4100
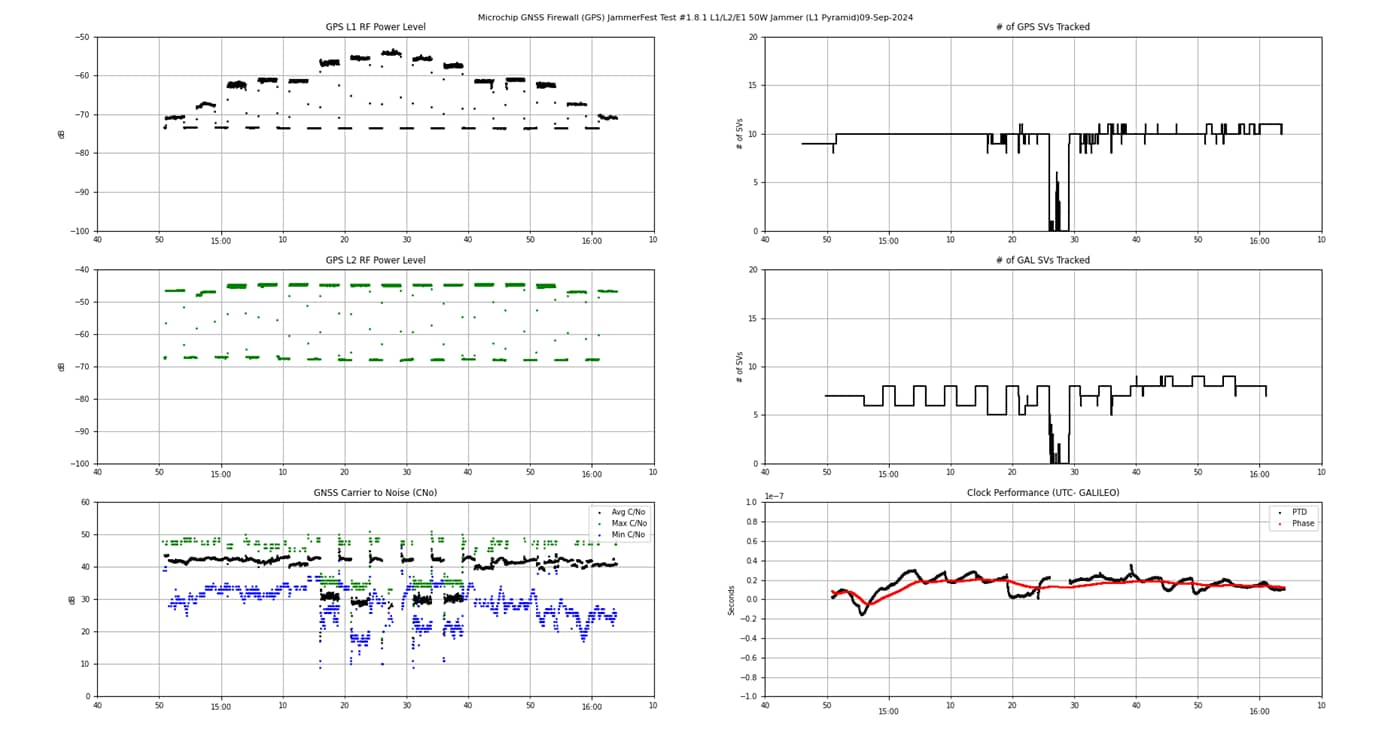 Figure 4. BlueSky Firewall – Test Block 1.8.1 |
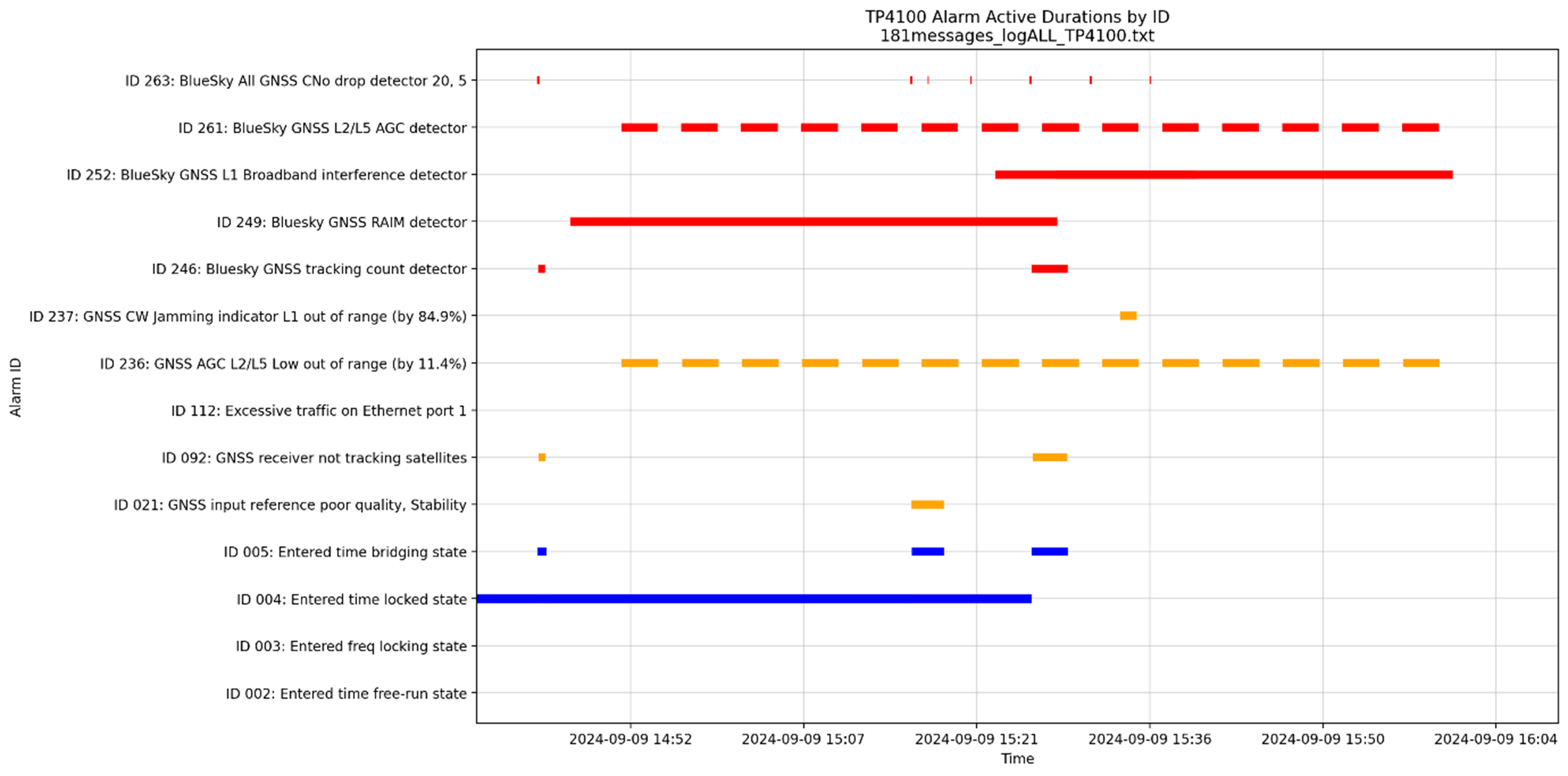 |
| Figure 5. TimeProvider 4100 – Test Block 1.6.1 |
The provided plots illustrate the GNSS performance monitoring capabilities of two different systems—the BlueSky GNSS Firewall and the TimeProvider 4100 (TP4100)—during a structured interference event. Although they employ different data collection and analysis methods, both systems exhibit strong temporal and functional alignment in detecting and responding to GNSS degradation. Key similarities are outlined below.
Temporal Correlation in Interference Detection
- Both graphs capture the onset of a GNSS interference event beginning around 15:20 UTC and lasting through approximately 15:35–15:40 UTC.
- In the BlueSky GNSS Firewall plots, a stair-step increase in L1 RF power is observed, with corresponding C/No drops and tracking loss events occurring during this same window, consistent with intentional jamming.
- In the TP4100 alarm plot, a series of GNSS-related alarms—including RAIM, AGC, broadband interference and satellite tracking loss—become active starting near 15:20 UTC, peaking by 15:30, which aligns precisely with the BlueSky measurements.
Loss of Satellite Tracking
- Both systems show clear evidence of satellite visibility degradation during the interference window:
- The BlueSky GNSS Firewall shows a decline in the number of tracked GPS and Galileo SVs, particularly a near-loss of lock between 15:20 and 15:30.
- The TP4100 raises alarms such as “GNSS receiver not tracking satellites” (ID 092) and “Tracking count detector” (ID 246), confirming tracking instability consistent with the BlueSky data.
RF Environment and Receiver Response
- Each system detects and responds to changes in the RF environment:
- BlueSky registers elevated RF power levels across L1 and L2, along with sharp drops in Carrier-to-Noise Ratio (C/No) during the critical interference period.
- The TP4100 concurrently logs AGC out-of-range alarms (ID 236, 261), and broadband interference on L1 (ID 252), indicating that its internal receivers are experiencing signal saturation—consistent with the RF patterns observed by BlueSky.
Complementary Signal Monitoring
Though the two systems serve distinct roles—BlueSky functioning as an RF-centric sensor and TP4100 as a timing-focused receiver—they both provide a coherent narrative of the same GNSS disruption event. BlueSky quantifies signal degradation in terms of RF power, satellite visibility and clock performance, while the TP4100 translates those degradations into operational alarms and synchronization state transitions (e.g., time bridging and free-run modes). Their mutual alignment enhances confidence in the validity and severity of the interference event.
Summary of Characteristics
Table 2. Summary of Characteristics between Firewall and TimeProvider 4100
Characteristic | Bluesky GNSS Firewall | TimeProvider 4100 | Similarity Highlighted |
Detection Start Time | ~15:20 UTC | ~15:20 UTC | Synchronized event onset |
Satellite Tracking Loss | Decline in GPS/GAL SV count | Alarms: GNSS receiver not tracking, tracking drop | Confirms signal acquisition failure |
RF Interference Indication | L1/L2 power increase, C/No drop | Alarms: AGC out of range, broadband interference | Confirms elevated RF power |
Clock/Timing Disruption | Phase/PTD deviation during jamming | Entered “bridging” and “freerun” timing states | Confirms GNSS time loss and degraded stability |
Detection Modality | Continuous RF + GNSS signal metrics | Alarm and state-driven operational framework | Aligned responses from signal-layer to system-level |
These similarities reinforce the strong correlation between low-level RF signal degradation and high-level system performance alerts. Together, the BlueSky GNSS Firewall and TimeProvider 4100 provide complementary perspectives that enable robust detection, diagnosis and mitigation of GNSS interference threats in real-world deployments.
Conclusion
The 2024 Jammertest event provided a critical opportunity to evaluate the resilience of Microchip’s GNSS timing infrastructure—specifically the BlueSky® GNSS Firewall, SyncServer® S650 and TimeProvider® 4100—under a wide range of controlled jamming and spoofing conditions. Across all tested scenarios, these systems demonstrated strong consistency in detecting, quantifying and responding to GNSS interference events through both physical-layer signal monitoring and system-level alarm generation.
The comparative analyses presented in this report highlight the effectiveness of a layered defense strategy. The BlueSky GNSS Firewall offers granular visibility into RF signal conditions, including carrier-to-noise ratio degradation, RF power anomalies and satellite tracking loss. In parallel, both the S650 and TP4100 systems translate these impairments into actionable alerts, internal state changes and clock protection mechanisms that preserve timing integrity under attack.
The temporal alignment and diagnostic agreement across all platforms confirm the reliability and interoperability of our timing solutions in hostile RF environments. These findings not only validate the performance of embedded BlueSky Technology in field conditions but also underscore the importance of integrated GNSS threat detection in safeguarding critical infrastructure.
As GNSS-based services continue to underpin vital operations across industries, Microchip’s participation in Jammertest reflects a broader commitment to advancing interference detection, mitigation, and recovery strategies. The lessons learned from this campaign will inform future product development and contribute to strengthening the security and resilience of global PNT systems.