Loading
Log in to myMicrochip to access tools and benefits. Sign up in just one minute.
Maximize Your Experience: Reap the Personalized Advantages by Completing Your Profile to Its Fullest. Update Here
Stay in the loop with the latest from Microchip. Update your profile while you are at it. Update Here
Complete your profile to access more resources. Update Here
true
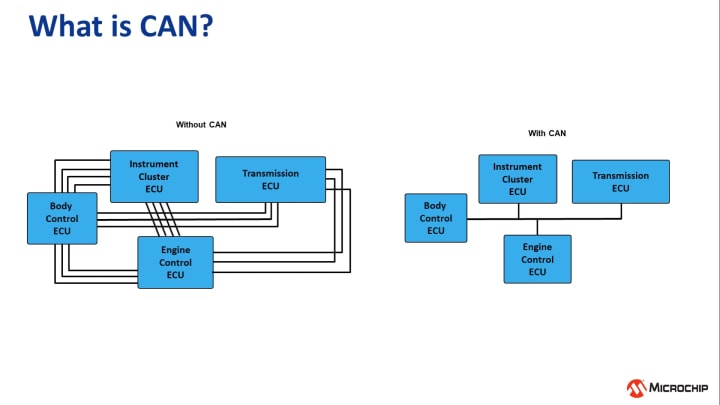
What is CAN?
Controller Area Network (CAN) and Controller Area Network Flexible Data-Rate (CAN FD) are serial communication protocols commonly used in industrial and automotive applications. CAN 2.0 is the newest version of the classic CAN standard, whereas CAN FD is a similar, mostly compatible (see section below) serial standard that supports a higher data rate and larger data transfers when transmitting the payload. The CAN bus is ideal for noisy electrical environments due to its high immunity to common-mode noise present.

Should I Use CAN 2.0 or CAN FD?
CAN FD is a newer version of the CAN standard that increases the maximum payload of each packet and the speed of data transfers. Both CAN 2.0 and CAN FD start communication at 1 Mbps. After arbitration on the CAN bus, the CAN FD transmitter can increase the bit rate up to a maximum of 5 Mbps when transmitting the payload portion of the message. In some cases, limitations in firmware or bus characteristics may require the use of a slower data rate than the maximum.
While CAN 2.0 and CAN FD messages can exist on the same bus, CAN FD messages will trigger an error on CAN 2.0 controllers. Additionally, CAN FD doesn’t support remote frames.
CAN Support in Microcontrollers
On microcontrollers (MCUs) with a CAN peripheral, the peripheral can support either CAN 2.0 or CAN FD. CAN FD parts may operate as standard CAN 2.0, however devices designed for CAN 2.0 cannot support CAN FD communication. The device data sheet contains more information about the CAN bus standards supported in the device.
Peripheral Integration
MCUs that contain Direct Memory Access (DMA) channels can move CAN packets independently of the CPU for improved device performance. This allows the CPU to spend more time processing and handling other tasks in the system.

Functional Safety for MCUs
Many of our 8-bit products are functional safety ready to help you achieve functional safety certification for your products. For more information about functional safety on our products, please visit our functional safety page.
What Do I Need to Get Started With CAN?
An MCU with a CAN peripheral only needs a CAN transceiver to interface with the bus. If the MCU does not have a CAN peripheral, you can connect a discrete controller and a transceiver to the MCU.

8-bit MCUs With CAN Peripherals
Similar Devices
CAN FD on a PIC18-Q84 Microcontroller
The PIC18-Q84 family of 8-bit microcontrollers is the first family of 8-bit PIC® microcontrollers that contains a hardware CAN controller that supports CAN FD.