
Loading
Log in to myMicrochip to access tools and benefits. Sign up in just one minute.
Maximize Your Experience: Reap the Personalized Advantages by Completing Your Profile to Its Fullest. Update Here
Stay in the loop with the latest from Microchip. Update your profile while you are at it. Update Here
Complete your profile to access more resources. Update Here
Model-Based Design, Code Generation and Real-Time Debugging
MPLAB Device Blocks for Simulink
Code Generation Blocks for dsPIC33 DSCs, PIC32 and SAM MCUs for Simulink's Embedded Coder
Create stand-alone applications from a Simulink discrete time model and with just one click generate, compile and load the code for your application onto your target device. The MPLAB Device Blocks for Simulink is a free set of user interfaces and Simulink peripheral blocks for developing complex designs based on our dsPIC33 DSCs and PIC32, SAM E70, SAM E5x, SAM D2x and SAM C2x MCUs. The package also includes many examples in the form of demo models to further simplify your development, such as a complete Permanent Magnet Synchronous Motor (PMSM) and Brushless DC (BLDC) motor control applications.
These blocks are supported by the following Simulink design tools:
- Fixed-Point Designer
- Control System Toolbox
- DSP System Toolbox
- Motor Control Blockset
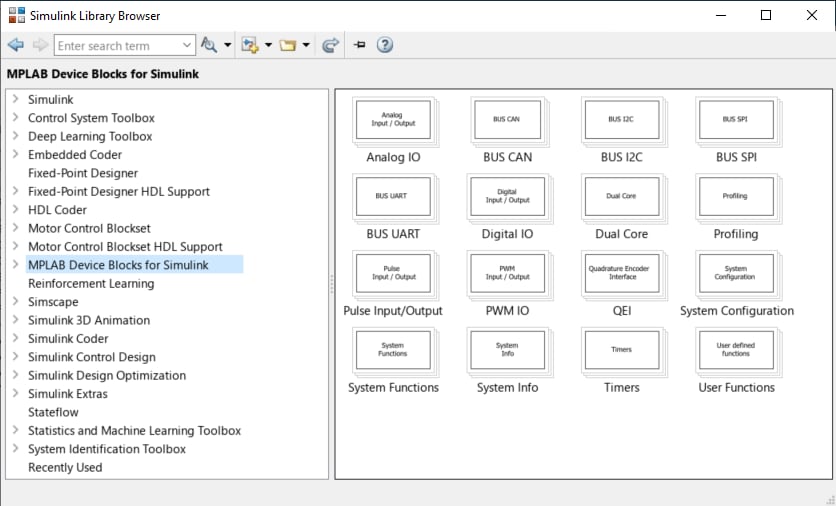
Key Features of MPLAB Device Blocks for Simulink
- Blocks for peripherals: Digital In/Out, Analog-to-Digital Converter (ADC), Pulse-Width Modulation (PWM), Change Notification, Output Compare, Input Capture, QEI, I2C, SPI, UART, Interrupt and Reset
- Target configuration blocks: Master Block, Simulink Reset Config, Compiler Option, Data Sheet, MCU Overload, MCU Load, Task State and Scheduler Option
- Ability to invoke dedicated functions written in C through a “C Function Call” block
- Real-time view/analyze or log variables within MATLAB through a configurable, PICGUI interface
- Supports MathWorks® Processor In the Loop (PIL) and External-Mode
- Creates a ready-to-use MPLAB X Integrated Development Environment (IDE) project
- Supports over 500 devices
- Supports our motor control development boards or any boards using a supported DSC or MCU device
Choose a Microchip Motor Control Development Board Template
Our motor control development board templates support the selection of motor control DSCs/MCUs and peripheral configuration from our product portfolio and the selection of our supported motor control development board. The templates also facilitate easy migration between the supported motor control development boards or between the various motor control devices to quickly evaluate different control options.
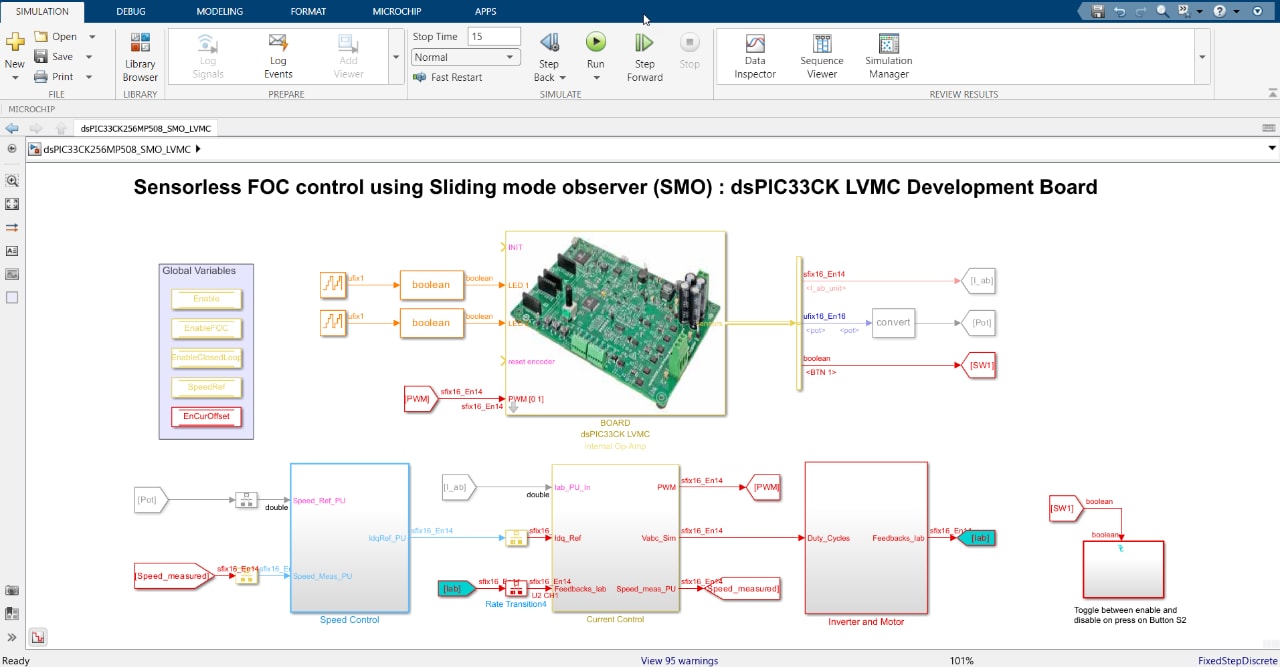
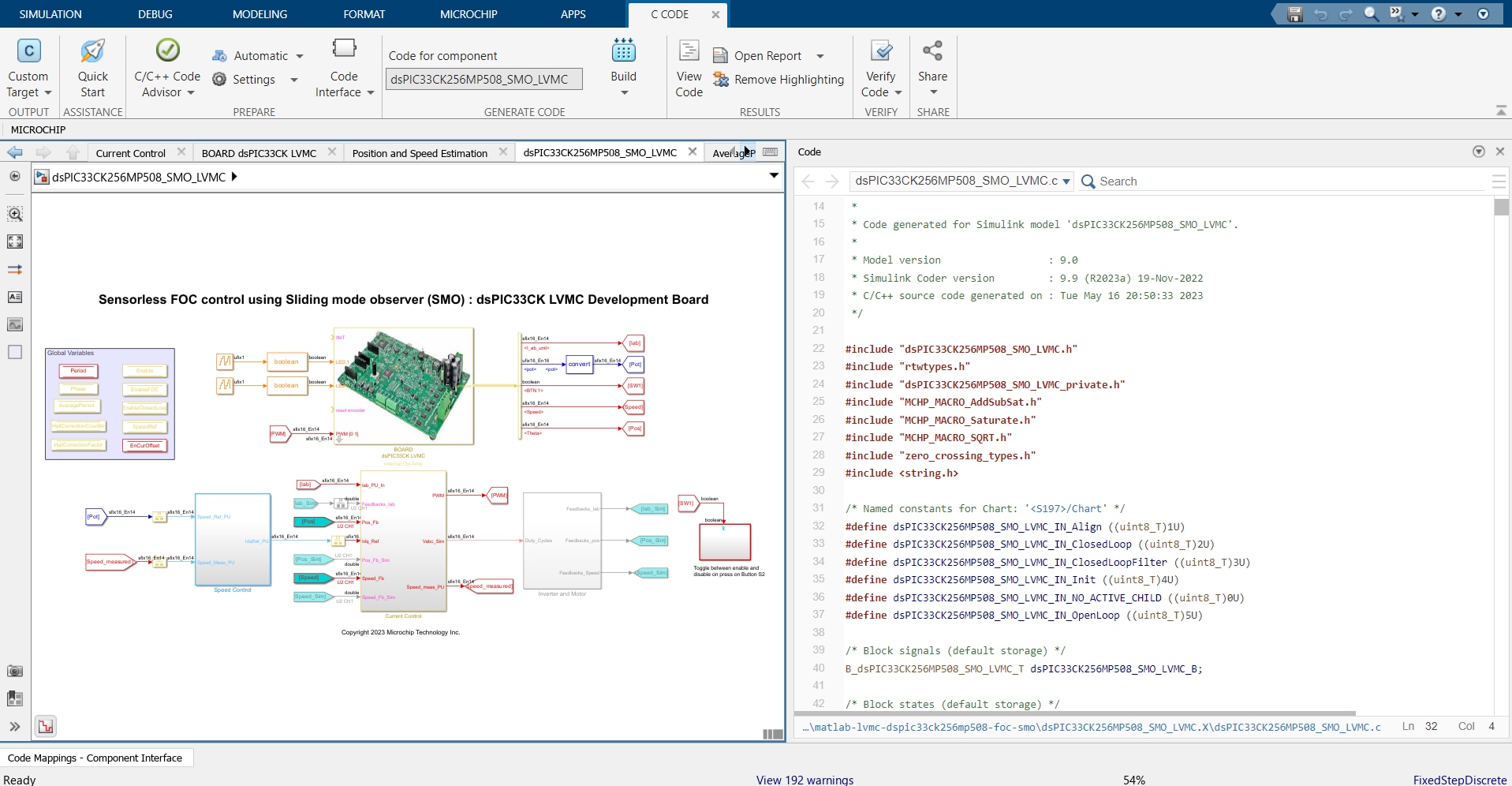
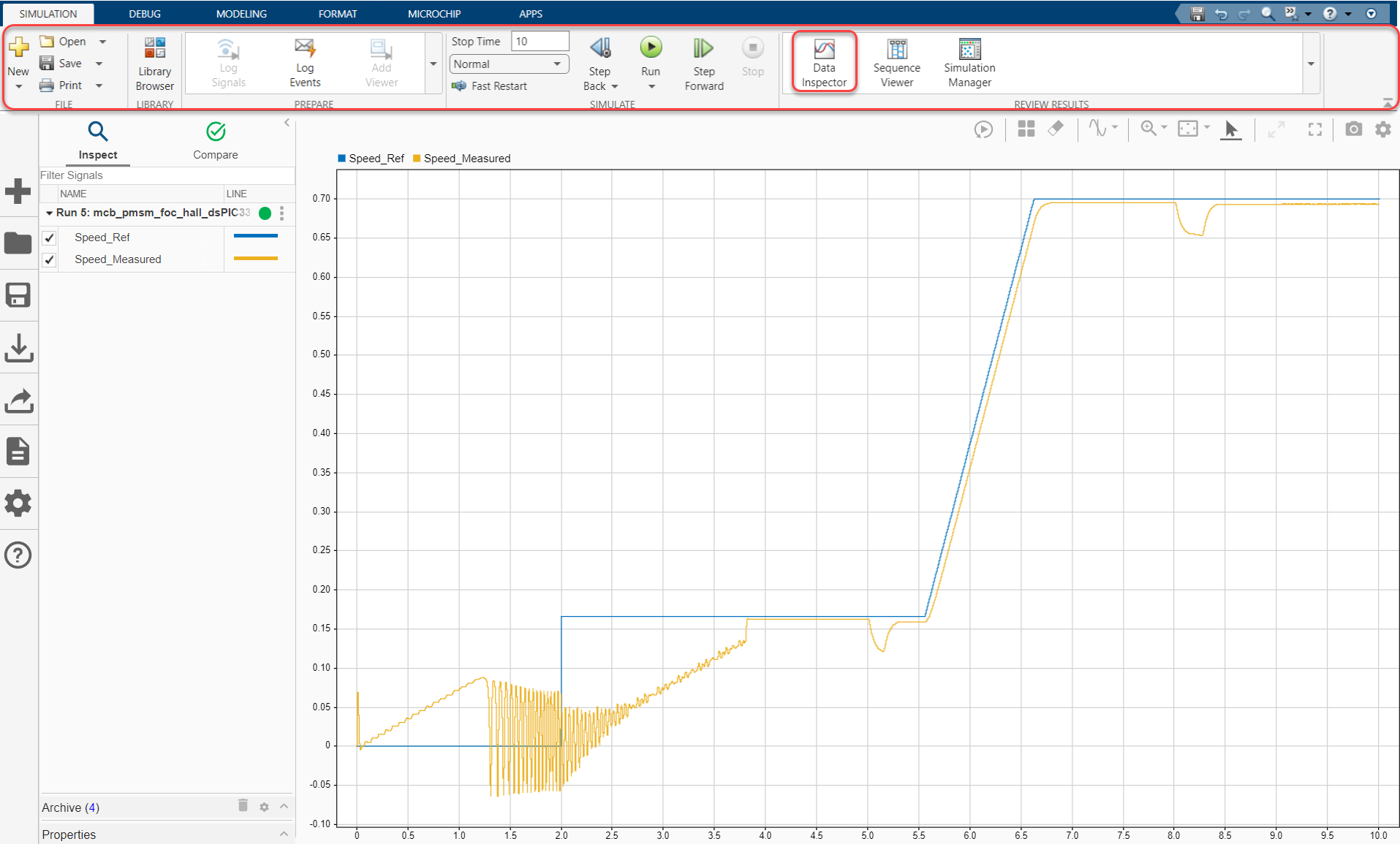
Simulation and Code Generation
You can simulate a control algorithm, generate the code and program a dsPIC® DSC or SAM MCU from the Simulink model. You can use the MPLAB X IDE for the final tuning of the code generated from the model.
dsPIC33CK Low-Voltage Motor Control (LVMC) Development Board

MCS MCLV-48V-300W Development Board
dsPIC33CK256MP508 Motor Control DIM
dsPIC33CK64MC105 Motor Control DIM

PIC32MK MCM Motor Control Plug-In Module

PIC32MK1024 Motor Control Plug-In Module
PIC32CM MC00 Motor Control Plug-In Module
- Latest Simulink Models
- Additional Models
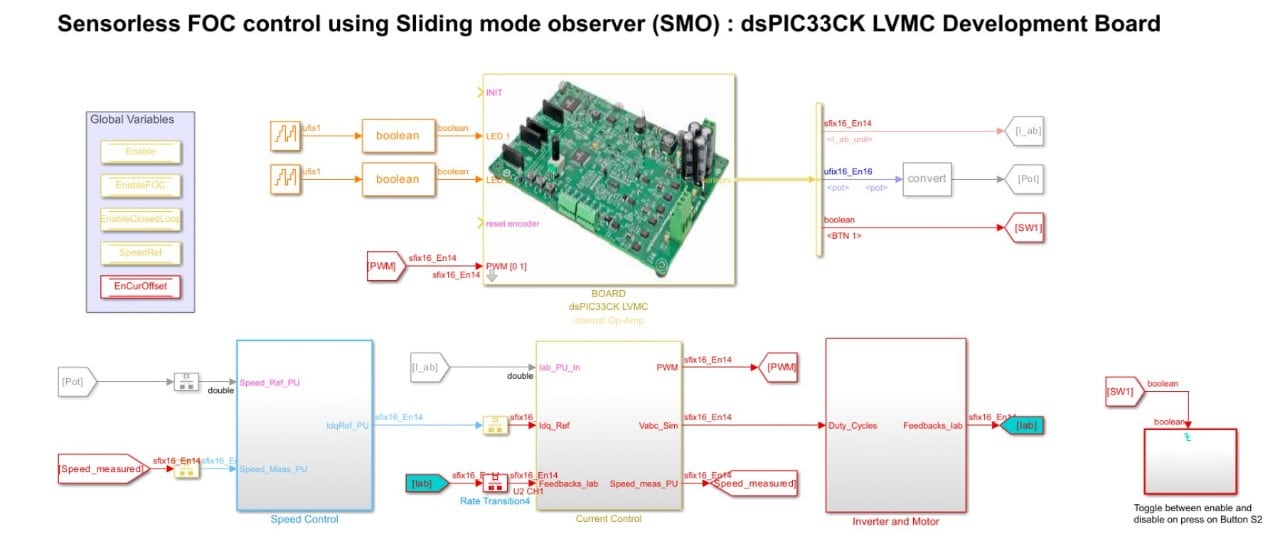
MATLAB Simulink Model for Sensorless FOC Using Sliding Mode Observer (SMO)
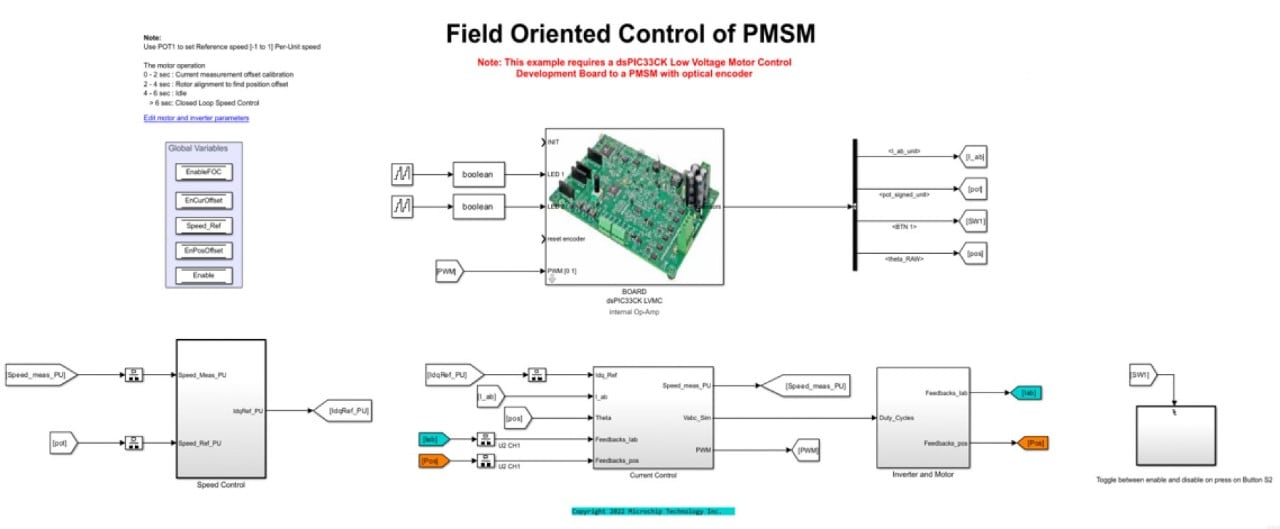
MATLAB Simulink Model for Optical Encoder Based FOC using LVMC
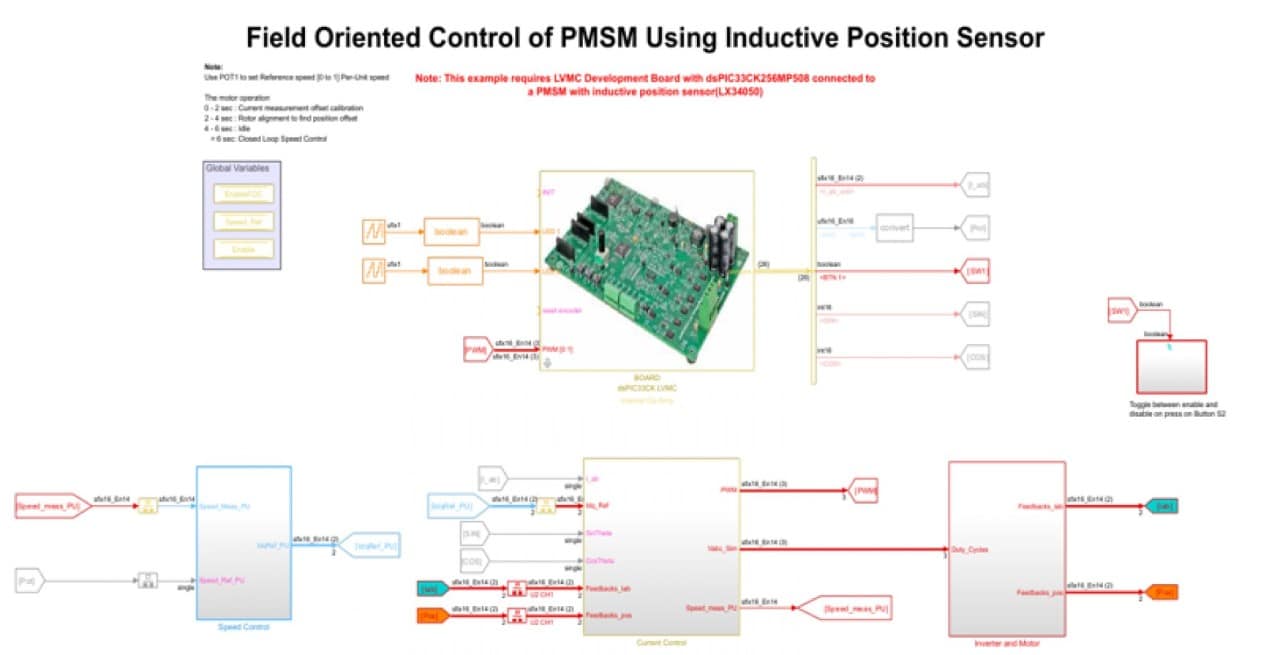
MATLAB Simulink Model for Inductive-Position-Sensor-Based FOC Using LVMC
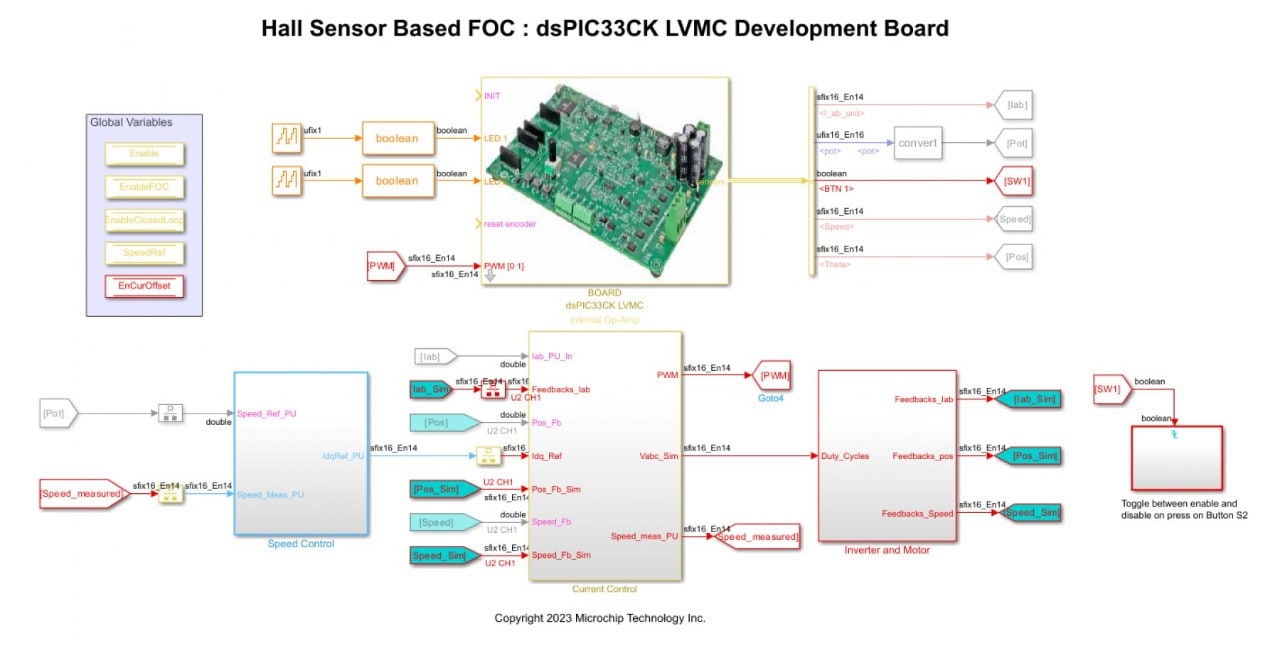
MATLAB Simulink Model for Hall-Sensor-Based FOC Using LVMC
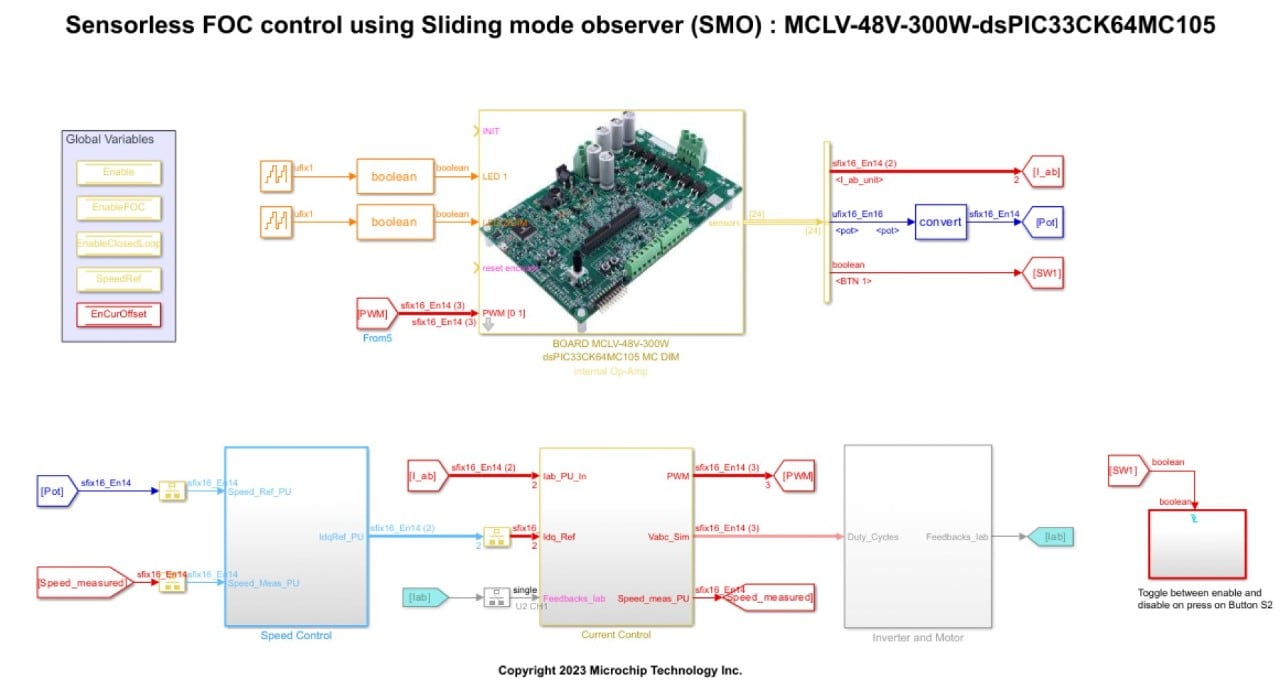
MATLAB Simulink Model for MCLV-48V-300W dsPIC33CK256MP508 FOC Sliding Mode Observer (SMO)
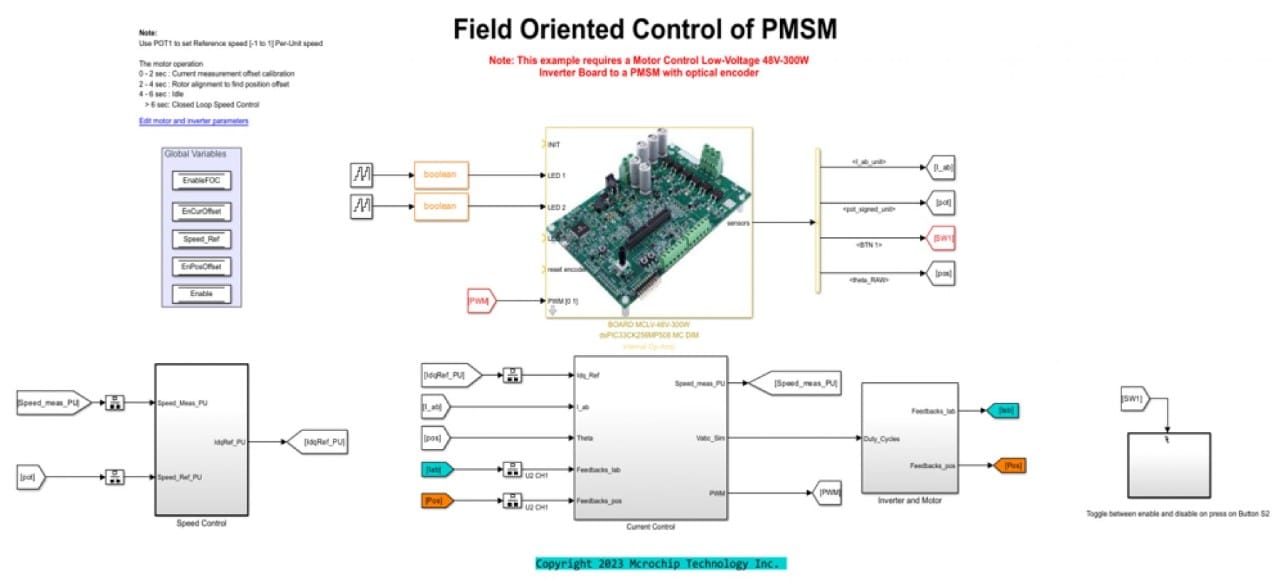
MATLAB Simulink Model for MCLV-48V-300W dsPIC33CK256MP508 FOC Optical Encoder
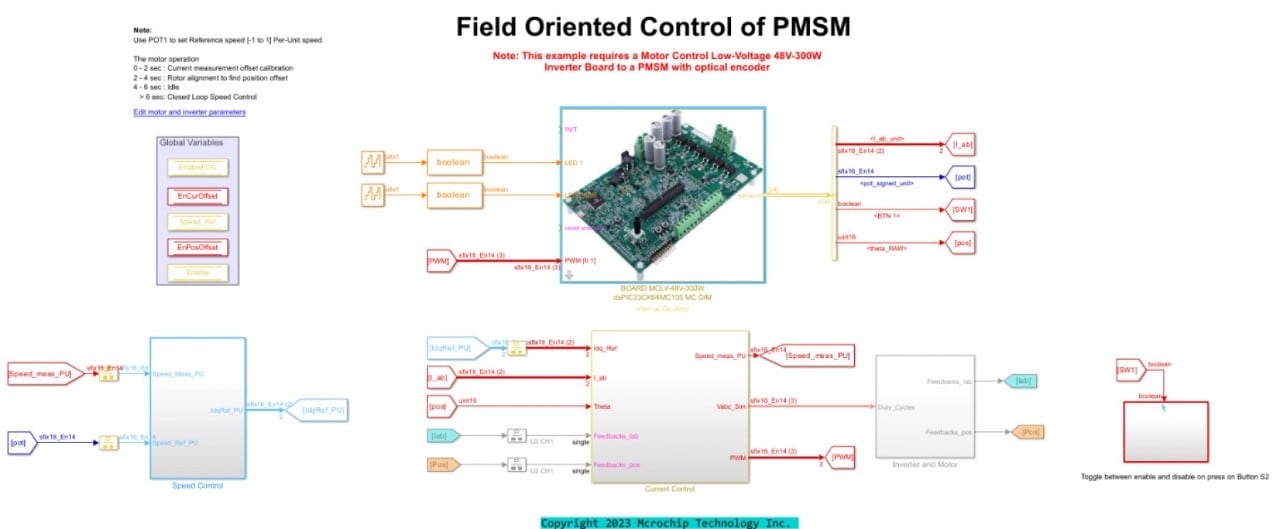
MATLAB Simulink Model for MCLV-48V-300W dsPIC33CK64MC105 FOC Optical Encoder
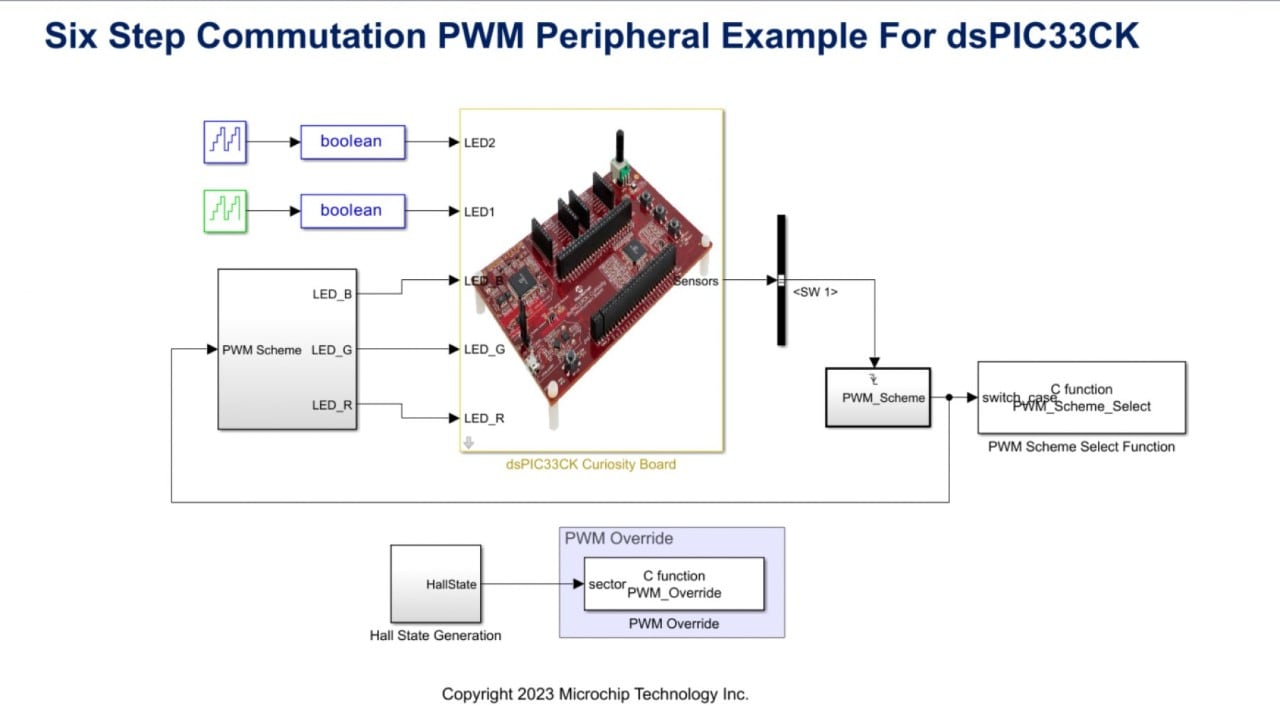
MATLAB Simulink dsPIC33CK PWM Peripheral Example
MATLAB and Simulink Models
MATLAB Simulink Model for Hall-Sensor-Based Six-Step Commutation of BLDC Motor
Regenerative Braking
MATLAB MCLV-48V-300W dsPIC33CK64MC105 FOC Sliding Mode Observer (SMO)
MATLAB Simulink Model of Single-Stage Boost Power Factor Correction Converter
MATLAB Simulink Model of Interleaved Boost Power Factor Correction Converter
MATLAB LVMC ATSAME70Q21 Sensorless PMSM FOC
MATLAB LVMC ATSAME70Q21 Sensored PMSM FOC Position Control
MATLAB LVMC ATSAME70Q21 Sensored PMSM FOC
Similar Devices
- Webinars
- User Guides
- Third-Party Support
