

Loading
Log in to myMicrochip to access tools and benefits. Sign up in just one minute.
Maximize Your Experience: Reap the Personalized Advantages by Completing Your Profile to Its Fullest. Update Here
Stay in the loop with the latest from Microchip. Update your profile while you are at it. Update Here
Complete your profile to access more resources. Update Here
PIC32MK microcontrollers (MCUs) combine 32-bit, 120 MHz performance with up to 1 MB of dual-panel live update Flash memory with Error Code Correction (ECC) for creating high-performance applications. They offer a range of communications and other peripherals combined with a rich feature set of high-performance analog motor control functions that make them an excellent option for developing motor control, industrial control, Industrial Internet of Things (IIoT) and automotive applications.
PIC32MK GPD/GPE/MCF Family (Legacy Products): These devices have CAN instead of CAN FD, lower-bandwidth op amps, no ECC on the Flash and no I2C interface.
PIC32MK MCM Family Block Diagram

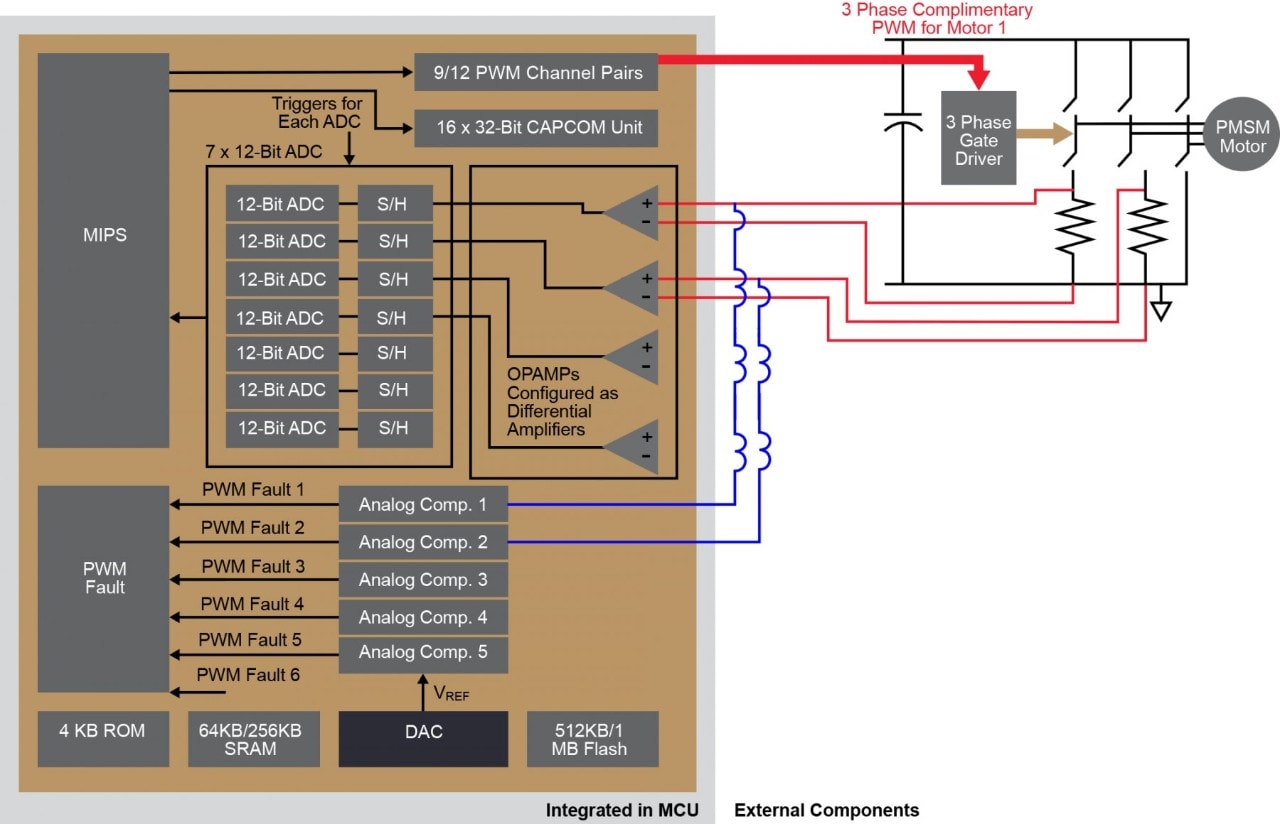
Sensorless Single-Motor Drive with PIC32MK MCUs
PIC32MK MCUs make it easy and cost effective to implement single-motor drive applications. Their internal op amps reduce the need for external devices. Use their multiple Analog-to-Digital (ADC) conversion cores to dedicate an ADC to each motor phase that you want to measure rather than sharing the conversion of two or more phases on a single ADC. This reduces code complexity and increases resolution since you can capture more samples per phase without having to calculate complex timing between phases on a single ADC. Internal high-speed comparators with PWM fault triggering can also be used as over-current protection across the two measured phases.
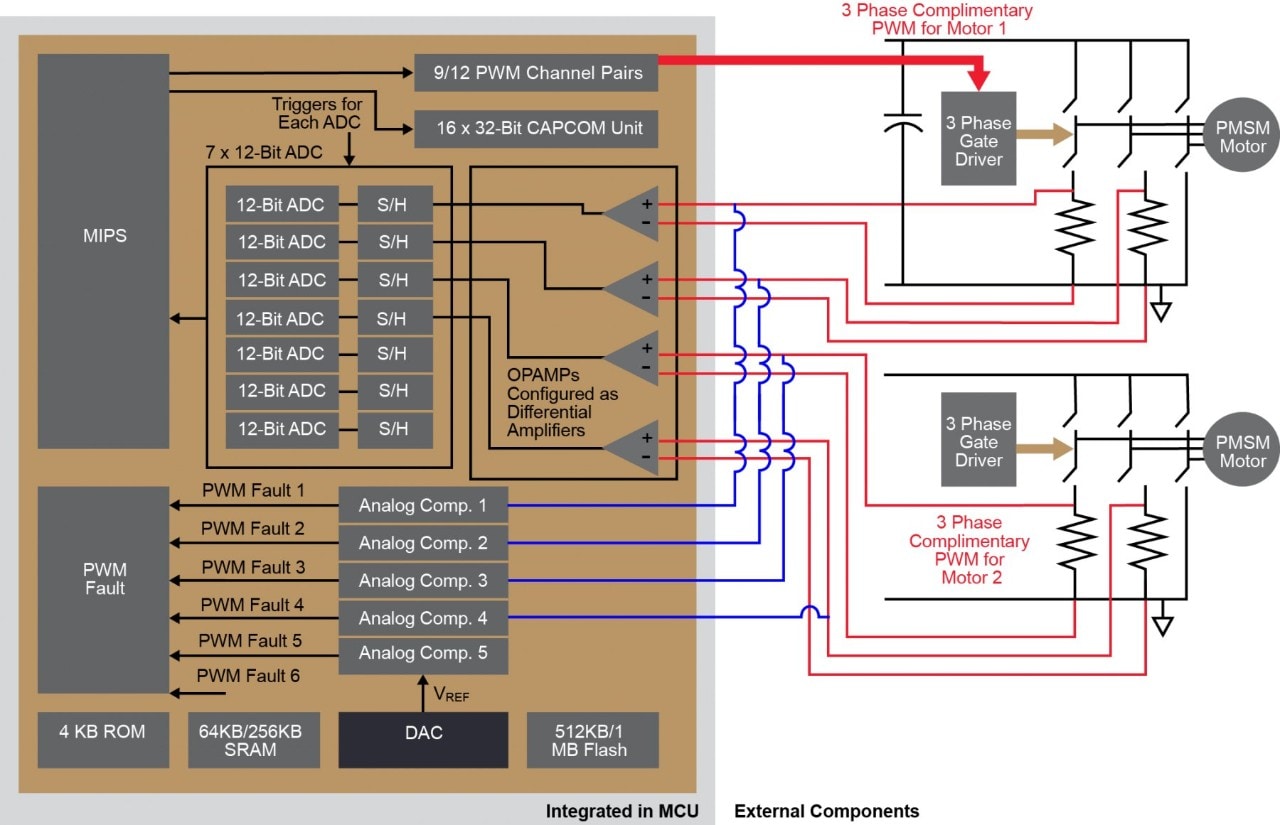
Sensorless Dual-Motor Drive with PIC32MK MCUs
Many motor control applications require multiple motors. With their hefty selection of integrated peripherals, the PIC32MK series of MCUs is up to the challenge of driving dual, sensorless motor applications. Although it is similar to the block diagram for single-motor, dual-shunt sensorless control, this block diagram shows that the peripheral requirements are doubled for two motors. Since the PIC32MK MCUs offer seven ADC conversion cores, you don’t have to worry about sharing converters between phases or motors. This significantly reduces the software timing overhead. All four op amps and four out of five comparators are used for this application.
Sensored Motor Control with PIC32MK MCUs
Simulation and Modeling Tools
Scilab Key Features
- Mathematics and simulation
- Data visualization
- Optimization
- Statistics
- Control system design and analysis
- Signal processing
- Algorithm development
- Application deployment
Xcos Key Features
- Standard palettes and blocks
- Model building and edition
- Model customization and Modelica blocks creation
- Simulation
Documentation
- Application Notes
- Brochures
- Data Sheets
- Errata
- Product Documents
- Technical Briefs
|
Title
|
|
|---|---|
| World's Fastest Embedded Interleaved 12-bit ADC Using PIC32MZ and PIC32MK Families | Download |
| EMI, EMC, EFT, and ESD Circuit Design Consideration for 32-bit Microcontrollers Application Note | Download |
| Sensored (Encoder-Based) Field Oriented Control of a Three Phase Permanent Magnet Synchronous Motor (PMSM) | Download |
| Sensorless Field Oriented Control (FOC) for a Permanent Magnet Synchronous Motor (PMSM) Using a PLL Estimator and Equation-based Flux Weakening (FW) Application Note | Download |
|
Title
|
|
|---|---|
| PIC32MK General Purpose and Motor Control (GPK/MCM) with CAN FD Family Silicon Errata and Data Sheet Clarifications | Download |
|
Title
|
|
|---|---|
| The Difference Between MPLAB Harmony v3 PLIBs and Drivers, and When to Use Them | Download |