Loading
Log in to myMicrochip to access tools and benefits. Sign up in just one minute.
Maximize Your Experience: Reap the Personalized Advantages by Completing Your Profile to Its Fullest. Update Here
Stay in the loop with the latest from Microchip. Update your profile while you are at it. Update Here
Complete your profile to access more resources. Update Here
true
Need Help?
Privacy Policy {"SalesForceSecurePath":"https://microchip.my.salesforce-scrt.com","EmbeddedServiceName":"Messaging_For_Microchip","SalesForcePath":"https://microchip.my.site.com/ESWMessagingForMicrochi1755319480924","AgentAvailableHeader":"No problem. Chat with our engineering experts or schedule a call that's convenient for you.","ScheduleCallUrl":"https://microchip.my.site.com/schedulemeetingportal/s/","SalesforceOrgId":"00Do0000000KAkK","JsUrl":"https://microchip.my.site.com/ESWMessagingForMicrochi1755319480924/assets/js/bootstrap.min.js"}
Live Chat
The Motor Control Library is a collection of functions that you can use as building blocks for implementing Field Oriented Control (FOC) of 3-phase motor control applications on dsPIC® Digital Signal Controllers (DSCs). The library functions are designed to be used within any application framework to create high-performance, memory-efficient and flexible motor control designs. The block diagram to the right shows a typical usage scenario. The Motor Control Library is architected to enable a user application to call time-critical control loop functions in it and take advantage of the motor control peripherals available on the dsPIC33 DSCs to implement a design. The Motor Control Library is extensively used as a library in our source code for application note and it is integrated into our Motor Control Application Framework (MCAF) and motorBench® Development Suite.
The Motor Control Library hosts functions in two implementation variants:
- C - functions are declared with static and inline keywords.
- Assembly - functions are defined in a C-callable archive file with function interfaces defined in the motor_control.h file.
Library users may choose to use one or both or a mixture of these two implementation variants. Unused implementation variants of the library will not consume data or program memory on the target device.

Elements of the Library
Installation
Motor Control Library Function List
Are You Looking for Motor Control Software for 32-bit Microcontrollers?
dsPIC33 Motor Control Products
Similar Devices
Documentation
- Application Notes
- Brochures
- Code Examples
- Software
- User Guides
|
Title
|
|
|---|---|
| Sensorless Field Oriented Control (FOC) of an AC Induction Motor (ACIM) Using Field Weakening | Download |
| Integrated Power Factor Correction (PFC) and Sensorless Field Oriented Control (FOC) System for Microchip 32-bit Microcontrollers Application Note | Download |
| Sensorless Field Oriented Control (FOC) of an AC Induction Motor (ACIM) | Download |
| AC Induction Motor Fundamentals | Download |
| VF Control of 3-Phase Induction Motor Using Space Vector Modulation | Download |
| Sensored (Encoder-Based) Field Oriented Control of a Three Phase Permanent Magnet Synchronous Motor (PMSM) | Download |
| Sensorless Field Oriented Control (FOC) for a Permanent Magnet Synchronous Motor (PMSM) Using a PLL Estimator and Equation-based Flux Weakening (FW) Application Note | Download |
| Sensorless Field Oriented Control (FOC) for a Permanent Magnet Synchronous Motor (PMSM) Using a PLL Estimator and Field Weakening (FW) | Download |
| Brushless DC Motor Control Made Easy | Download |
|
Title
|
|
|---|---|
| CE002 Configuring 10-Bit dsPIC DSC A/D Converters for 1 Msps Conversion Rate | Download |
| CE019 - Proportional Integral Derivative (PID) controllers & closed-loop control | Download |
| CE155 - Real-Time Data Monitoring (RTDM) Example | Download |
| PFC Sensorless FOC PLL Estimator MCHV | Download |
| Sensorless FOC PLL Estimator MCLV | Download |
|
Title
|
|
|---|---|
| dsPIC33 Motor Control Library for FOC | Download |
Title
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Vestibulum vehicula velit sit amet turpis rutrum vehicula. Donec eu varius velit, nec ultricies arcu. Fusce vitae pulvinar lorem. Etiam sodales et ipsum volutpat suscipit. Aliquam non mauris ut lectus volutpat feugiat id eget massa. Aliquam vel eleifend metus. Nam ultricies, risus sed tempor suscipit, dolor ligula sodales erat, et porta magna sem fermentum felis. Orci varius natoque penatibus et magnis dis parturient montes, nascetur ridiculus mus. Donec commodo magna at scelerisque sollicitudin. Morbi elit tortor, blandit vel imperdiet in, ullamcorper eu tortor. Etiam dapibus eleifend elementum. Vestibulum finibus efficitur mauris, vitae convallis ex molestie non. Etiam luctus at mauris accumsan finibus.

Using the LX7720 and SAMRH71 for Motor Control Applications in Space
This video demonstrates using the LX7720 Rad Hard Motor Control IC with the SAMRH71 Rad Hard Arm MPU for satellite motor control and position sensing applications. Key features of each component are given along with a description of the evaluation system using the LX7720-DB daughter board with the SAMRH71F20-EK evaluation kit.

Getting Started with motorBench® Development Suite v2.25
Getting Started with motorBench® Development Suite v2.25
motorBench® Development Suite is a software development tool for Field Oriented Control (FOC) based motor control applications. This tutorial shows you how to go from installation to code generation within minutes.
dsPIC® Refrigerator Compressor Reference Design
dsPIC® Refrigerator Compressor Reference Design
This video will introduce you to Microchip’s refrigerator compressor reference design that will help you to rapidly prototype and develop a cost-effective and innovative design using a dsPIC33 Digital Signal Controller.
motorBench® Development Suite Demo
motorBench® Development Suite Demo
This video will demonstrate how motorBench development suite and the dsPIC33 DSCs simplify spinning a BLDC or PMSM motor.
dsPIC Motor Control Development Tools Demonstration
dsPIC Motor Control Development Tools Demonstration
Microchip's dsPIC33 DSCs enable the design of high-performance, precision motor control systems that are more energy efficient, quieter in operation, have a great range and extended life. See how they can be used to control brushless DC, permanent magnet synchronous, AC induction and stepper motors.

Scalable dsPIC33C DSCs for Time-Critical Applications
Scalable dsPIC33C DSCs for Time-Critical Applications
This video introduces Microchip’s latest dsPIC33C family of DSCs offering single core and dual core variants for time-critical control and high-performance embedded applications.
Optimized Air Conditioner Design with the Dual Core dsPIC33CH DSCs
Optimized Air Conditioner Design with the Dual Core dsPIC33CH DSCs
This video will introduce you the dual core dsPIC33CH DSC based Air Conditioner reference design.

Introducing the dsPIC33CH Family of Dual-Core Digital Signal Controllers (DSCs)
Introducing the dsPIC33CH Family of Dual-Core Digital Signal Controllers (DSCs)
This video is a quick introduction to the high-performance dual-core and peripheral of the dsPIC33CH family of DSCs. Learn how to take advantages of the new features of the dsPIC33CH family of DSCs, in your next real-time embedded system development.
Dual-Core dsPIC33CH DSCs Get Simplified with MPLAB® Code Configurator (MCC)
Dual-Core dsPIC33CH DSCs Get Simplified with MPLAB® Code Configurator (MCC)
This video will demonstrate the basic setup of MPLAB® Code Configurator for a dual-core dsPIC DSCs.

dsPIC33CH Dual Core Demonstration
dsPIC33CH Dual Core Demonstration
Ever wish you had a microcontroller with an extra core to handle your complex application? Watch how our new dsPIC33CH dual core family operates two cores independently of each other making them ideal for your high-end embedded control system.
Event Sequencing using Peripheral Trigger Generator (PTG)
Event Sequencing Using Peripheral Trigger Generator (PTG)
This video will introduce you to one of our new peripherals, the Peripheral Trigger Generator or commonly referred as PTG, available on 16-bit dsPIC33 digital signal controllers. The video will give a glimpse into the capabilities of PTG peripheral, which can help you in addressing the challenges of sequencing asynchronous tasks and event triggers.
Cost-Effective BLDC Motor Control with PIC32MM
Cost-Effective BLDC Motor Control with PIC32MM
Learn how you can implement a cost-effective BLDC motor control solution with low cost PIC32MM 32-bit MCUs.
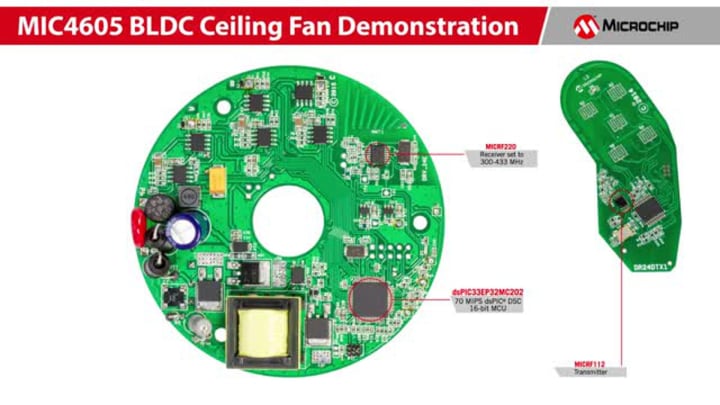
MIC4605 BLDC Ceiling Fan Demonstration
MIC4605 BLDC Ceiling Fan Demonstration
This video demonstrates a highly efficient BLDC ceiling fan using complete microchip solutions, such as microcontrollers, power management solutions (Controller, Regulator and LDO), and wireless communication ICs.
MCP8024 TQFP BLDC Evaluation Board Demo
MCP8024 TQFP BLDC Evaluation Board Demo
This video will demonstrate the MCP8024 BLDC Motor Driver Evaluation Board.

Microchip's Motor Driver Solutions FAQs
Microchip's Motor Driver Solutions FAQs
This video answers popular questions of highly integrated motor drivers from Microchip.

High Voltage Motor Control
High-Voltage Motor Control
Microchip's High Voltage Motor Control demo board showcases the capability of the dsPIC Digital Signal Controller for motor control.

Microchip dsPIC® DSC Motor Control Solutions
Microchip dsPIC® DSC Motor Control Solutions
Microchip’s advanced motor control solutions in action at DESIGN West 2012! A dsPIC® digital signal controller controls a BLDC motor, an AC induction motor, and a stepper motor using high performance motor control techniques.

MCP8024 3-Phase BLDC Motor Gate Driver with Power Module Introduction
MCP8024 3-Phase BLDC Motor Gate Driver with Power Module Introduction
This video introduces Microchip’s first feature-rich 3-phase bldc motor gate driver with power module and provides detailed features.

Low-Voltage Motor Control Bundle Demonstration from the 2014 Microchip MASTERs Conference
Low-Voltage Motor Control Bundle Demonstration from the 2014 Microchip MASTERs Conference
Here is a quick demonstration on how Microchip’s Low-Voltage Motor Control Bundle drives two 10V-24V motors simultaneously.